
Car Powertrain Basics, How-To & Design Tips
The powertrain of a vehicle provides the means of generating power (the engine) and the means of transmitting that power to the wheels (the driveline). The most basic powertrain consists of an engine plus various driveline components as required for the particular powertrain configuration.
These include components for torque multiplication (Transmission/Transaxle/Differential), power transmission (Shafts, chains, belts), and power distribution (Rear End/Differential).
Engine Configurations
The engine configuration of the car has a big impact on weight distribution. It also dictates the driveline requirements, which in turn affect weight distribution as well. Weight distribution tends to be front-biased in production-based vehicles, so achieving a balance requires moving components to the rear of the car. In scratch-built cars, the engine tends to be moved further rearward, cancelling the front weight bias.
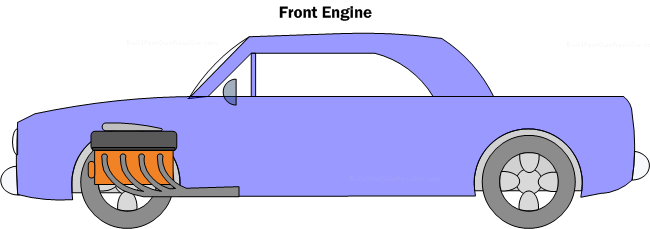
Diagram EC1. Front Engine Layout.
The front engine configuration, as shown in diagram EC1 above, has historically been the most popular configuration in road and race vehicles and continues to be the dominant configuration in production-based vehicles. Weight distribution tends to be front-biased in production-based vehicles, so achieving a balance requires moving components to the rear of the car.
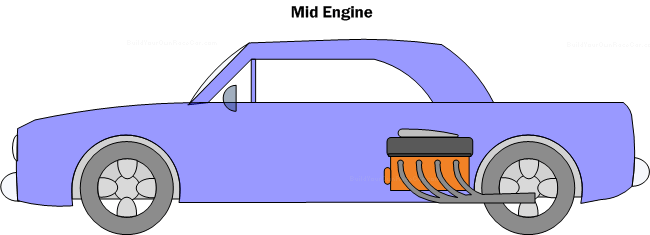
Diagram EC2. Mid-Engine layout.
The mid-engine configuration, as shown in diagram EC2 above, became popular in the late 1950s and early 1960s on open wheel cars as the weight distribution and low polar moment of inertia for the engine allowed more nimble cornering and balance. Prior to this, the pre-WWII Auto Union Grand prix car featured this configuration.
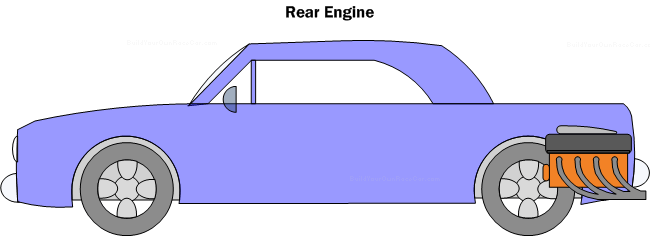
Diagram EC3. Rear Engine Layout
The rear engine configuration, shown in diagram EC3 above, is the least used of all types, but has been used in two of the most popular road cars ever produced—The Volkswagen Beetle and the Porsche 911. The configuration places engine weight behind the rear wheels which provides more basic traction and weight transfer effect during acceleration. However, it reduces steering traction under acceleration and has a high polar moment of inertia for the engine.
Drive Configurations
Getting power from the engine to the ground is the job of the driving wheels/tires. The static weight distribution of the vehicle and the suspension geometry of the driving wheels has a major impact on the grip and acceleration a car can provide. If the weight distribution and suspension are not optimized to maximize grip, the vehicle will not perform at its peak.
Beyond the basic drive configuration, there are also components that should be considered during design. For example, limited-slip differentials, that can optimize the way power is delivered to the wheels and ensure it is not wasted on tires without grip.
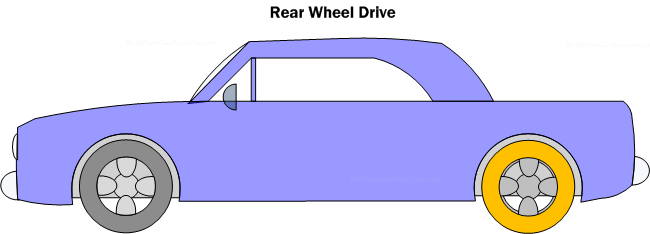
Diagram DC1. Rear Wheel Drive Configuration has the advantage of superior traction from weight transfer during acceleration (Over front wheel drive).
Rear wheel drive (RWD) (Diagram DC1 above) is the classic configuration for race cars and trucks as well as many road cars prior to the 1980s. This configuration permits maximum weight transfer to the driving wheels, no matter which engine configuration it is coupled with.
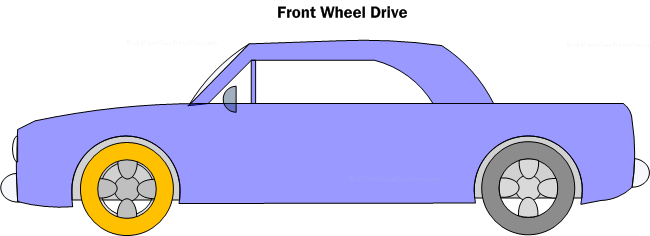
Diagram DC2. Front wheel drive configuration is used in some production-based race cars, and is competitive when pitted against other front wheel drive vehicles.
Front wheel drive (FWD) has been popularized in modern road cars and is used in many production-based race cars. The configuration, as shown in Diagram DC2 above, does create some very desirable traits for daily-driven use, but has its drawbacks for racing purposes—Using one set of tires to both steer and drive the vehicle limits available traction and creates understeer. Upon acceleration, the weight transfer to the rear tires also unloads the front tires somewhat, limiting acceleration grip.
That said, there are plenty of opportunities to race front wheel drive vehicles on a level playing field, as when pitted against other front wheel drive machines.
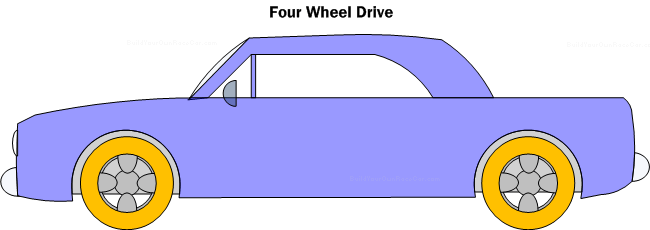
Diagram DC3. Four wheel drive configuration provides immense traction during acceleration.
Four wheel drive (4WD) (Diagram DC3 above) is the dominant drive configuration for pickup trucks and has become popular in road cars where the climate has snow or ice. Many sports cars have made use of 4WD to create optimal acceleration. Some race cars, primarily Rally cars, use this configuration. However the use of 4WD in other cars has largely depended on whether 4WD is banned or not. Because all four wheels provide grip, the acceleration can be tremendous especially if the weight transfer and suspension geometry maximizes the grip for all four tires during acceleration. The penalty is having twice the drivetrain complexity and the potential of more drivetrain failures.
Powertrain Configurations
Front Engine/Rear Drive
This configuration shown in diagram PC1 below can provide a nearly balanced front/rear static weight distribution if the engine is placed behind the front wheel centerline and other components are suitably located to offset the engine being in the front half of the vehicle.
From a maintenance perspective, the simplicity of the layout enables easy access to the longitudinal engine, separate transmission and final drive (differential).
As weight transfer to the rear wheels occurs during acceleration, having that weight provide more grip to the driving tires is a definite advantage to this configuration. The rear driving wheels can also aid in steering the vehicle through power application, which is another reason it is favored in sports and racing vehicle applications.
Applications: Autocross/Solo, Drag Racer (Production-Based), GT, Midget (Full Size), Midget (Quarter), Off-road Truck, Pickup Truck (Scratch-built), Rally, Sprint (Full Size), Stock Car (Scratch-built /Late Model), Stock Car (Production-Based), Street Rod, Supercar, Touring Car
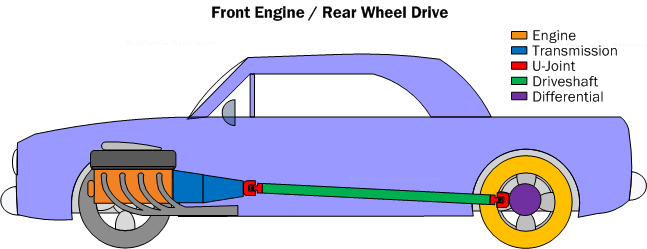
Diagram PC1. Front Engine/Rear Wheel Drive Configuration reduces the packaging tightness found in mid-engine/rear wheel drive configurations.
Front Small Engine/Rear Tractor Transaxle Drive
Rider mower racing has become a popular form of grassroots racing, both for its cost and relative simplicity. The basic configuration is shown below in diagram PC2.
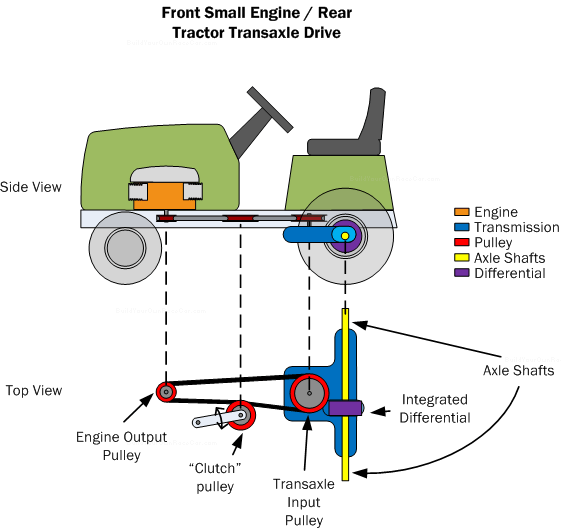
Diagram PC2. The front small engine/rear tractor transaxle drive powertrain presents some interesting opportunities for building low-cost racing machines, not just lawnmower racers.
Rider mowers use vertical shaft commercial/industrial small engines usually in the 15 HP and higher range. The engine’s output shaft drives a pulley which in conjunction with a “tension” or “clutch” pulley, enables the engine to engage the drivetrain. The drivetrain consists of a transaxle which is driven by a pulley.
The nature of stock rider mowers is not to go fast, but low cost and readily available small engines and transaxles offer a base powertrain configuration to work from. The gearing internal to the transaxles can be altered to increase output speed, while the pulley sizes used outside the transaxle can be altered to increase input speed as well. With current rider mower racing configurations, 60 mph (100 km/h) is theoretically possible with the right tire size and transaxle modifications. This more than matches many 4-stroke Karts.
There are several benefits of the tractor transaxle and small commercial/industrial engine. First, the engines can be purchased new for very reasonable money. The transaxles can also be purchased new, and parts to increase their speed purchased off-the-shelf.
The transaxles come with up to 6-speed sequential shift through a linkage. The transaxles also have integrated differentials and built-in axles that may work out-of-the-box for some novel race vehicle designs.
Even though this configuration has been a Rider mower racing configuration to date, for an amateur designer looking to build a competitive short track vehicle, this often overlooked powertrain configuration might fit the bill.
Powertrain Tips (1/2)
Keep Powertrain Simple
Overly complicated and tightly packaged powertrain may make a lot of sense at top racing levels or for exotics manufacturers, but for amateurs, the more difficult it is to maintain, reach and repair, the less enjoyable you’ll find your machine.
Optimize Power
If you have multiple engine or tuning options, selecting the one with the best power and delivery characteristics is of prime importance. Then, above and beyond the basic working powertrain, there are small tweaks that can help give more power.
Designing air intakes to provide ram air effect to the engine, using high quality lubricants, and removing unnecessary engine accessories that rob power are all basic ways to boost the available horsepower. Look for areas where friction can be reduced and engine breathing/combustion efficiency can be improved. You may find many small gains, but they do add up.
Position Powertrain Components as Close to CG as Possible
The polar moment of inertia discussed elsewhere in our guide provides some insight into why placing components close to the Center of Gravity (CG) of the vehicle is a good idea. Turning the vehicle with components close to the CG is much easier than turning it with components placed at the farthest distance from the CG. A good parallel is to think of swinging a short baseball bat versus a long baseball bat. A lot more effort is needed to swing the long one.
22 1 29 5